Eksa konventsiyalari - Axes conventions
Yilda ballistik va parvoz dinamikasi, eksa konvensiyalari joylashuvi va yo'nalishini belgilashning standartlashtirilgan usullari koordinata o'qlari sifatida ishlatish uchun ma'lumotnoma doirasi. Mobil ob'ektlar odatda belgilangan deb hisoblangan tashqi freymdan kuzatiladi. Ushbu ko'chma moslamalarda boshqa moslamalarni nisbiy joylashuvi bilan ishlash uchun boshqa ramkalarni aniqlash mumkin. Nihoyat, munosabat yoki yo'nalishlar tashqi ramka va uyali aloqa ob'ekti ustida aniqlangan o'rtasidagi munosabatlar bilan tavsiflanishi mumkin.
Avtotransport vositasining yo'nalishi odatda shunday ataladi munosabat. Bu odatda tomonidan tasvirlangan yo'nalish tanadagi sobit mos yozuvlar tizimiga nisbatan o'rnatilgan ramkaning. Muvofiqlik tasvirlangan munosabat koordinatalari, va kamida uchta koordinatadan iborat.[1]
Geometrik nuqtai nazardan yo'nalishlarni tavsiflashning turli usullari faqat ba'zi bir mos yozuvlar ramkalari yordamida aniqlangan bo'lsa, muhandislik qo'llanmalarida ushbu ramkalarning laboratoriyaga va tanadagi harakatga qanday bog'langanligini tasvirlash ham muhimdir.
Havo transportida xalqaro konventsiyalarning alohida ahamiyati tufayli, bir nechta tashkilotlar amal qilishlari kerak bo'lgan standartlarni nashr etdilar. Masalan, Germaniyaning DIN nashri tomonidan nashr etilgan Din Samolyotlar uchun 9300 norma[2] (ISO tomonidan ISO 1151-2: 1985 sifatida qabul qilingan).
Yer bilan chegaralangan o'qlar konvensiyalari

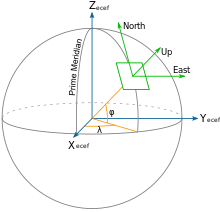
Jahon ma'lumotnomalari: ENU va NED
Asosan laboratoriya ramkasi yoki mos yozuvlar tizimi sifatida ramkalar uchun ikkita konventsiya mavjud:
- Sharq, Shimoliy, Yuqoriga (ENU), geografiyada ishlatiladi
- Shimoliy, Sharqiy, Down (NED), maxsus aerokosmikda ishlatiladi
Ushbu ramka w.r.t.ga havola qilingan Earth Center Earth Fixed (ECEF) noaniq tizim kabi global ma'lumotnomalar.
Xulq-atvorni tavsiflash uchun dunyo ma'lumotlari
Yondashuvlarni tavsiflovchi standart konvensiyani o'rnatish uchun hech bo'lmaganda mos yozuvlar tizimining o'qlarini va qattiq tanani yoki transport vositasining o'qlarini o'rnatish kerak. Aniq notatsiya tizimi ishlatilganda (masalan Eylerning burchaklari ) ishlatiladigan konventsiya ham bayon qilinishi kerak. Shunga qaramay, ko'p ishlatiladigan yozuvlar (matritsalar va kvaternionlar) bir ma'noga ega.
Tait-Bryan burchaklari ko'pincha transport vositasining tanlangan mos yozuvlar tizimiga bo'lgan munosabatini tavsiflash uchun ishlatiladi, ammo boshqa har qanday yozuvlardan foydalanish mumkin. Ijobiy x- transport vositalaridagi eksa har doim harakat yo'nalishi bo'yicha. Ijobiy uchun y- va z-axsis, biz ikkita turli xil konventsiyalarga duch kelishimiz kerak:
- ENU tizimini (Sharqiy-Shimoliy-yuqoriga) tashqi mos yozuvlar sifatida ishlatadigan avtomobillar, tanklar va boshqalar kabi quruqlikdagi transport vositalarida (Jahon ramkasi), transport vositasining (tanasining) ijobiy y- yoki balandlik o'qi har doim chap tomonga va ijobiy tomonga ishora qiladi z- yoki yaw o'qi har doim ishora qiladi. Jahon ramkasining kelib chiqishi avtomobilning og'irlik markazida joylashgan. [3]
- Aksincha, NED-tizimidan (Shimoliy-Sharqdan pastga) tashqi suvosti sifatida foydalanadigan dengiz osti kemalari, kemalar, samolyotlar va boshqalar kabi havo va dengiz transporti vositalarida (Jahon ramkasi), transport vositasining (tanasining) ijobiy y- yoki balandlik o'qi har doim o'ng tomonga va ijobiy tomonga ishora qiladi z- yoki yaw o'qi har doim pastga ishora qiladi. Jahon ramkasining kelib chiqishi avtomobilning og'irlik markazida joylashgan.
- Va nihoyat, kosmik avtoulovlar va boshqalar kabi kosmik transport vositalarida, transport vositasining (tanasining) ijobiy holatida oxirgi konvensiyaning modifikatsiyasi qo'llaniladi. y- yoki balandlik o'qi yana har doim o'ng tomonga ishora qiladi va uning musbat z- yoki yonbosh o'qi har doim pastga ishora qiladi, ammo hozir "pastga" ikki xil ma'noga ega bo'lishi mumkin: Agar so'zda mahalliy ramka tashqi mos yozuvlar sifatida ishlatiladi, uning ijobiy z o'qi yerning o'rtasiga "pastga" ishora qiladi, xuddi yuqorida aytib o'tilgan NED tizimida bo'lgani kabi,[4] lekin agar inersial ramka mos yozuvlar sifatida ishlatiladi, uning ijobiy z o'qi hozirga to'g'ri keladi Shimoliy samoviy qutb, va uning ijobiy o'qi Vernalga to'g'ri keladi Equinox[5] yoki boshqa biron bir mos yozuvlar meridiani.
Avtotransport vositalariga o'rnatilgan ramkalar
Maxsus samolyotlar uchun ushbu ramkalar yuqoriga qarab chiziqdagi er bilan chegaralangan ramkalar bilan kelishishga hojat yo'q. Bu erda ENU va NED nimani anglatishini kelishib olish kerak.
Quruqlik transport vositalari uchun konventsiyalar

Quruqlik transport vositalari uchun ularning to'liq yo'nalishini tasvirlash kamdan-kam uchraydi, faqat gaplashadigan paytlar bundan mustasno elektron barqarorlikni boshqarish yoki sun'iy yo'ldosh navigatsiyasi. Bunday holda, konventsiya odatda qo'shni rasmlardan biridir, bu erda RPY turadi rulonli pitch-yaw.
Dengiz transporti vositalari uchun konventsiyalar

Samolyotlar singari, xuddi shu terminologiya kemalar va qayiqlarning harakati. Odatda ishlatiladigan ba'zi so'zlar dengiz navigatsiyasida kiritilgan. Masalan, yaw burchak yoki sarlavha, a ga ega dengiz kelib chiqishi, "kursdan chetga chiqish" ma'nosi bilan. Etimologik jihatdan u "borish" fe'liga bog'liq.[6] Bu tushunchasi bilan bog'liq rulman. Odatda stenografiya yozuvi beriladi ψ.[7]
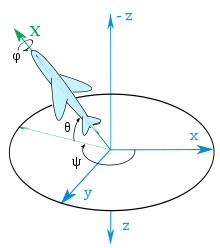
Mahalliy yo'nalishdagi samolyotlar uchun konventsiyalar


Samolyotga bo'lgan munosabatni tavsiflash uchun koordinatalar (Sarlavha, Balandlik va Bank) odatda qo'mondon minorasida joylashgan mos yozuvlar boshqaruv ramkasiga va shuning uchun ENUga boshqaruv minorasining er yuzidagi holatiga nisbatan beriladi.
Samolyotdan olib borilgan kuzatuvlarni tavsiflash uchun koordinatalar odatda uning ichki o'qlariga nisbatan beriladi, lekin odatda qiziqarli nuqtalar joylashgan pastga qarab pastga qarab koordinatani ijobiy sifatida ishlatadi. Shuning uchun ular odatda NED.
Ushbu o'qlar odatda X o'qi oldinga yo'naltirilgan uzunlik o'qi, Z o'qi vertikal o'qi pastga yo'naltirilgan va Y o'qi lateral o'q bo'lib, ramka shunday ko'rsatiladi. o'ng qo'l.
The harakat Samolyot ko'pincha bu o'qlar atrofida aylanish nuqtai nazaridan tavsiflanadi, shuning uchun ular atrofida aylanish X-aksislga aylanish, aylantirish deyiladi Y-aksis pitching va atrofida aylanish deyiladi Z-aksisni yawing deyiladi.
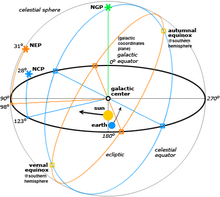
Er atrofida aylanib yuradigan sun'iy yo'ldoshlar uchun bu odatiy holdir Ekvatorial koordinatalar tizimi. Yer ekvatorining osmon sferasiga proektsiyasi samoviy ekvator. Xuddi shunday, Yerning shimoliy va janubiy geografik qutblarining proektsiyalari shimol va janubga aylanadi samoviy qutblar navbati bilan.
Chuqur kosmik sun'iy yo'ldoshlar boshqasidan foydalanadi Osmon koordinatalari tizimi, kabi Ekliptik koordinatalar tizimi.
Sun'iy yo'ldosh sifatida kosmik kemalar uchun mahalliy konventsiyalar


Agar maqsad shutlni o'z orbitalari davomida osmonga nisbatan doimiy munosabatda bo'lishini ta'minlash bo'lsa, masalan. ma'lum bir astronomik kuzatishlarni amalga oshirish uchun afzal qilingan mos yozuvlar inersial ramkava RPY burchagi vektori (0 | 0 | 0) shundan keyin moki qanotlari erning ekvatoriga doimiy ravishda parallel tutilib, uning burni vernalga doimiy ravishda qarab turadigan munosabatni tavsiflaydi. tengkunlik va uning qorinlari shimolga qarab qutb yulduzi (rasmga qarang). (Shuni esda tutingki, raketalar va raketalar vertikal tenglama tomon emas, balki RPY burchak vektori (0 | 0 | 0) shimolga ishora qiladigan samolyotlar uchun konventsiyalarga amal qiladi).
Boshqa tomondan, agar maqsad shutlni o'z orbitalari paytida er yuziga nisbatan doimiy munosabatda bo'lish bo'lsa, afzal qilingan ma'lumot bu bo'ladi mahalliy ramka, moki qanotlari er yuziga parallel bo'lgan, burni uning yo'nalishiga ishora qilayotgan va qorinni erning markaziga qaratgan munosabatni tavsiflovchi RPY burchak vektori (0 | 0 | 0) (rasmga qarang).
Aloqalarni tavsiflash uchun foydalaniladigan ramkalar
Odatda transport vositasining mahalliy kuzatuvlarini tavsiflash uchun ishlatiladigan ramkalar uning erni kuzatib borish stantsiyalariga bo'lgan munosabatini tasvirlash uchun bir xil ramkalardir. ya'ni kuzatuv stantsiyasida ENU ramkasi ishlatilgan bo'lsa, shuningdek, ENU ramkalari bortda ishlatiladi va ushbu ramkalar mahalliy kuzatuvlarga murojaat qilish uchun ham ishlatiladi.
Bunga taalluqli bo'lmagan muhim holat samolyotdir. Samolyot kuzatuvlari pastga qarab amalga oshiriladi va shuning uchun odatda NED o'qlari konvensiyasi qo'llaniladi. Shunga qaramay, erdagi stantsiyalarga nisbatan munosabat bildirilganda, er bilan chegaralangan mahalliy ramka va ENU doirasi o'rtasidagi munosabatlar qo'llaniladi.
Shuningdek qarang
- Muvofiqlik dinamikasi va boshqarish (kosmik kemasi)
- Eylerning aylanish teoremasi
- Giroskop
- Uchlik usuli
- Uch o'lchamdagi rotatsion formalizmlar
- Geografik koordinatalar tizimi
- Astronomik koordinata tizimlari
Adabiyotlar
- ^ Hanspeter Schaub, Jon L. Junkins (2003). "Qattiq tana kinematikasi". Kosmik tizimlarning analitik mexanikasi. Amerika Aviatsiya va astronavtika instituti. p. 71. ISBN 1-56347-563-4.
- ^ Luft- und Raumfahrt; Begriffe, Größen und Formelzeichen der Flugmechanik; Bewegungen des Luftfahrzeugs und der Atmosphäre gegenüber der Erde [1]
- ^ NavCommand. IMAR inertial o'lchash va o'lchash tizimlarini boshqarish va sozlash uchun dasturiy ta'minot. Operatsion va foydalanuvchi ko'rsatmalari. St.Ingbert 2007 yil, 11-12 ko'chalar. http://www.imar-navigation.de/download/nav_command_en.pdf Arxivlandi 2006-09-23 da Orqaga qaytish mashinasi
- ^ Tadqiqot: Orbiterning mahalliy ma'lumoti (1995 yil 18 sentyabr) "Arxivlangan nusxa". Arxivlandi asl nusxasi 2007-07-14. Olingan 2010-10-08.CS1 maint: nom sifatida arxivlangan nusxa (havola) (maqola 2007 yildan beri mavjud emas)
- ^ Tadqiqot: Inertial Reference Orbiter Attitude (1995 yil 3 oktyabr) "Arxivlangan nusxa". Arxivlandi asl nusxasi 2007-07-14. Olingan 2010-10-08.CS1 maint: nom sifatida arxivlangan nusxa (havola) (maqola 2007 yildan beri mavjud emas)
- ^ Etimologiya onlayn lug'ati Arxivlandi 2010 yil 15-noyabr, soat Orqaga qaytish mashinasi
- ^ Xurt, H. H., kichik (1965 yil yanvar) [1960]. Dengiz aviatorlari uchun aerodinamik. AQSh hukumatining bosmaxonasi, Vashington shtati: AQSh dengiz kuchlari, aviatsiyani tayyorlash bo'limi. p. 284. NAVWEPS 00-80T-80.