O'liklarni hisoblash - Dead reckoning
Bu maqola uchun qo'shimcha iqtiboslar kerak tekshirish. (2010 yil mart) (Ushbu shablon xabarini qanday va qachon olib tashlashni bilib oling) |

Yilda navigatsiya, o'lik hisoblash - bu ilgari aniqlangan pozitsiyadan foydalangan holda ba'zi bir harakatlanuvchi ob'ektning joriy holatini hisoblash jarayoni yoki tuzatish, o'tgan vaqt davomida tezlikni, yo'nalishni va yo'nalishni taxmin qilish yordamida. Biologiyada hayvonlar o'zlarining pozitsiyalari yoki sarlavhalarini baholarini yangilash jarayonlarini tavsiflash uchun foydalaniladigan tegishli atama yo'l integratsiyasi.
O'liklarni hisoblash kümülatif xatolarga duch keladi. Avanslar navigatsiya vositalari xususan, pozitsiya to'g'risida aniq ma'lumot beradiganlar sun'iy yo'ldosh navigatsiyasi yordamida Global joylashishni aniqlash tizimi, odamlar tomonidan oddiy o'lik hisobini ko'p maqsadlarda eskirgan holga keltirdilar. Biroq, inertial navigatsiya tizimlari, bu juda aniq yo'naltirilgan ma'lumotlarni taqdim etadi, o'lik hisob-kitoblardan foydalanadi va juda keng qo'llaniladi.
Etimologiya
Dastlab "o'lik hisoblash" atamasi "chiqarilgan hisob" qisqartirish uchun ishlatilmadi va "ded hisob" atamasining noto'g'ri yozilishi ham emas. "Ded" yoki "hisobdan chiqarilgan hisob-kitob" dan foydalanish 1931 yildan oldin paydo bo'lganligi ma'lum emas, bu tarixda Oksford ingliz lug'atida 1613 yildayoq paydo bo'lgan "o'lik hisoblash" dan ancha keyinroq bo'lgan. Ammo bu muddatda "o'lik" ning asl maqsadi aniq emas. "Oldinda o'lik" kabi "mutlaq" so'zlarni etkazish uchun ishlatilganmi, "suvda o'lik" bo'lgan boshqa narsalar yordamida hisob-kitob qilishmi yoki "agar siz to'g'ri hisoblamasangiz, siz o'lgansiz" deb hisoblashni to'g'ri ishlatishmi, noma'lum. .[1]
So'zlarni navigatsion foydalanish bilan taqqoslaganda o'lik hisoblash har qanday o'zgaruvchan kattalik qiymatini oldingi qiymatdan foydalangan holda baholash va shu vaqt ichida sodir bo'lgan barcha o'zgarishlarni qo'shish orqali anglatadi. Ko'pincha, bu foydalanish o'zgarishlarning aniq ma'lum emasligini anglatadi. Oldingi qiymat va o'zgarishlarni o'lchash yoki hisoblash miqdori bo'lishi mumkin.
Xatolar
O'lik hisob-kitoblar ozgina matematikasi yoki tahlillari bilan mavjud pozitsiya bo'yicha mavjud bo'lgan eng yaxshi ma'lumotlarni berishi mumkin bo'lsa-da, bu taxminiy xatolarga olib keladi. Aniq pozitsion ma'lumot uchun tezlik va yo'nalish har doim sayohat paytida aniq bililishi kerak. Shunisi e'tiborliki, o'liklarni hisoblash suyuq muhit orqali sayohat paytida yo'nalishni siljishini hisobga olmaydi. Ushbu xatolar o'zlarini uzoqroq masofalarga biriktirishga moyil bo'lib, o'liklarni hisoblashni uzoq safarlarda navigatsiya qilishning qiyin usuliga aylantiradi.
Masalan, siljish g'ildirakning aylanish soni bilan o'lchanadigan bo'lsa, siljish yoki sirt usulsüzlükleri tufayli, har bir aylantirish uchun haqiqiy va taxmin qilingan bosib o'tgan masofa o'rtasidagi har qanday tafovut xato manbai bo'ladi. Joylashuvning har bir bahosi oldingisiga nisbatan bo'lgani uchun xatolar mavjud kümülatif yoki vaqt o'tishi bilan birikma.
Safar davomida yangi tuzatishlar olish uchun boshqa, ishonchli usullardan foydalangan holda o'liklarni hisoblashning aniqligi sezilarli darajada oshirilishi mumkin. Masalan, agar kimdir quruqlikda suzib yurgan bo'lsa, unda o'lik hisob-kitob yordamida belgini ko'rish imkoniyatiga ega bo'lish uchun, belgining o'ziga etib borishdan oldin, aniq ma'lum boshlanish nuqtasini berish mumkin. - va keyin yana yo'lga chiqish.
Mobil sensorli tugunlarni lokalizatsiya qilish
Mahalliylashtirish statik sensor tuguni biriktirish qiyin ish emas, chunki a GPS qurilma lokalizatsiya ehtiyojini qondiradi. Ammo a mobil sensor tuguni, vaqt o'tishi bilan geografik joylashuvini doimiy ravishda o'zgartiradigan joyni aniqlash qiyin. Ma'lumot yig'ish uchun ma'lum bir domen ichida asosan mobil sensor tugunlaridan foydalanish mumkin, ya'ni, boqish maydonidagi hayvonga bog'langan yoki jang maydonida askarga biriktirilgan sensor tuguni. Ushbu stsenariylarda har bir sensor tuguni uchun GPS qurilmasi mavjud emas. Buning sabablaridan ba'zilari cheklangan sensor tugunlarining narxi, hajmi va akkumulyator batareyalarini drenajlashni o'z ichiga oladi, bu muammoni bartaraf etish uchun maydon ichida cheklangan miqdordagi mos yozuvlar tugunlari (GPS bilan) ishlaydi. Ushbu tugunlar doimiy ravishda o'zlarining manzillarini translyatsiya qiladilar va yaqin atrofdagi boshqa tugunlar ushbu joylarni qabul qiladilar va ba'zi bir matematik usullardan foydalanib o'z pozitsiyalarini hisoblaydilar trilateratsiya. Mahalliylashtirish uchun mahalliylashtirish uchun kamida uchta ma'lum joy kerak. Adabiyotlarda Sequential Monte Carlo (SMC) uslubiga asoslangan bir qancha lokalizatsiya algoritmlari taklif qilingan.[2][3] Ba'zan ba'zi joylarda tugun faqat ikkita ma'lum joyni oladi va shu sababli lokalizatsiya imkonsiz bo'lib qoladi. Ushbu muammoni bartaraf etish uchun o'lik hisoblash texnikasi qo'llaniladi. Ushbu usul yordamida datchik tuguni keyingi vaqt oralig'ida mahalliylashtirish uchun avvalgi hisoblangan joyidan foydalanadi.[4] Masalan, 1-lahzada A tugun o'z o'rnini quyidagicha hisoblasa loca_1 uchta ma'lum mos yozuvlar joylari yordamida; keyin darhol 2 foydalanadi loca_1 boshqa ikkita mos yozuvlar tugunlaridan olingan ikkita boshqa mos yozuvlar joylari bilan birga. Bu tugunni nafaqat qisqa vaqt ichida lokalizatsiya qiladi, balki uchta mos yozuvlar joyini olish qiyin bo'lgan joylarda ham joylashadi.[5]
Tadqiqotlarida hayvonlarni navigatsiya qilish, o'lik hisob-kitoblar ko'proq ma'lum (faqat bo'lmasa ham) yo'l integratsiyasi. Hayvonlar undan so'nggi ma'lum bo'lgan joyidagi harakatlari asosida hozirgi joylashishini taxmin qilish uchun foydalanadilar. Chumolilar, kemiruvchilar va g'ozlar kabi hayvonlar o'z joylarini boshlang'ich nuqtaga nisbatan doimiy ravishda kuzatib borishlari va unga qaytishlari aniq uyga ega bo'lgan yemxo'rlar uchun muhim mahorat.[6][7]

Dengiz navigatsiyasida "o'lik" hisob-kitob uchastkasi odatda ta'sirini hisobga olmaydi oqimlar yoki shamol. Kema bortida o'lik hisob-kitob uchastkasi pozitsiya ma'lumotlarini baholash va kema harakatini rejalashtirishda muhim hisoblanadi.[8]
O'liklarni hisoblash ma'lum bir pozitsiyadan boshlanadi yoki tuzatish, keyin yozilgan sarlavha, tezlik va vaqt yordamida matematik yoki to'g'ridan-to'g'ri jadvalda rivojlanadi. Tezlikni ko'plab usullar bilan aniqlash mumkin. Zamonaviy asbobsozlikdan oldin kema bortida a yordamida aniqlangan chip jurnali. Ko'proq zamonaviy usullarni o'z ichiga oladi chuqur jurnali dvigatel tezligiga murojaat qilish (masalan. yilda rpm ) umumiy siljish jadvaliga (kemalar uchun) yoki a ning bosimi bilan oziqlangan havo tezligiga ishora qilish pitot naychasi. Ushbu o'lchov an ga aylantiriladi teng havo tezligi ma'lum bo'lgan atmosfera sharoitlariga va ko'rsatilgan havo tezligi tizimidagi o'lchov xatolariga asoslanadi. Dengiz kemasi a deb nomlangan qurilmadan foydalanadi chuqur qilich (rodmeter), bu kema suv orqali harakatlanishidan kelib chiqadigan elektromagnit dispersiyani o'lchash uchun metall tayoqchada ikkita datchikdan foydalanadi. Keyinchalik bu o'zgarish kema tezligiga aylantiriladi. Masofa tezlik va vaqtni ko'paytirish orqali aniqlanadi. Keyinchalik, ushbu dastlabki holat sozlanishi mumkin, natijada oqimni hisobga olgan holda taxminiy holatga olib keladi (sifatida tanilgan) o'rnatish va siljish dengiz navigatsiyasida). Agar pozitsion ma'lumot bo'lmasa, yangi o'lik hisob-kitob uchastkasi taxmin qilingan pozitsiyadan boshlanishi mumkin. Bunday holda, keyingi o'lik hisob-kitob pozitsiyalari taxmin qilingan to'plam va driftni hisobga oladi.
O'liklarni hisoblash pozitsiyalari oldindan belgilangan vaqt oralig'ida hisoblanadi va tuzatishlar orasida saqlanadi. Intervalning davomiyligi har xil. Bir kishining tezligi, yo'nalish xarakteri va boshqa yo'nalishdagi o'zgarishlar, shu jumladan, omillar, o'lik hisob-kitob pozitsiyalari qachon hisoblanishini belgilaydi.
18-asr rivojlanishidan oldin dengiz xronometri tomonidan Jon Xarrison va oy masofasi usuli, o'liklarni hisobga olish aniqlashning asosiy usuli edi uzunlik kabi dengizchilar uchun mavjud Xristofor Kolumb va Jon Kabot ularning transatlantik safarlarida. Kabi vositalar shpal taxtasi hatto savodsiz ekipaj a'zolari o'liklarni hisoblash uchun zarur bo'lgan ma'lumotlarni to'plashlari uchun ishlab chiqilgan. Polineziya navigatsiyasi ammo, boshqacha foydalanadi yo'l topish texnikalar.

1927 yil 21 mayda Charlz Lindberg tushdi Parij, Frantsiya bir motorli AQShda muvaffaqiyatli to'xtovsiz parvozdan so'ng Sent-Luis ruhi. Samolyot juda oddiy asboblar bilan jihozlanganligi sababli, Lindberg navigatsiya qilish uchun o'lik hisob-kitoblardan foydalangan.
Havodagi o'liklarni hisoblash dengizdagi o'liklarni hisoblashga o'xshaydi, ammo biroz murakkabroq. Samolyot harakatlanadigan havoning zichligi uning ishlashiga, shuningdek shamollar, og'irlik va quvvat parametrlariga ta'sir qiladi.
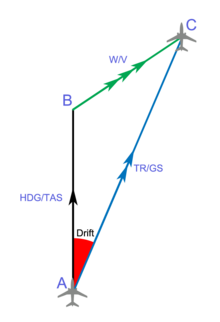
DR uchun asosiy formula bu masofa = tezlik x vaqt. 250 tugunli tezlikda 2 soat davomida parvoz qilgan samolyot havoda 500 dengiz milini bosib o'tdi. The shamol uchburchagi yo'nalish va tezlikni boshqarish uchun magnit yo'nalishni olish uchun shamolning yo'nalish va havo tezligiga ta'sirini hisoblash uchun ishlatiladi (er tezligi). Chop etilgan jadvallar, formulalar yoki E6B parvoz kompyuteri havo zichligi samolyotning ko'tarilish tezligiga, yoqilg'ining yonish tezligiga va havo tezligiga ta'sirini hisoblash uchun ishlatiladi.[9]
Kurs chizig'i belgilangan vaqt oralig'ida (har ½ soatda ayting) taxminiy pozitsiyalar bilan birga aeronavtika jadvaliga tushiriladi. Tuzatishlarni olish uchun er xususiyatlarini vizual kuzatishlardan foydalaniladi. Tuzatish va taxminiy pozitsiyani taqqoslab, samolyotning yo'nalishi va er tezligiga qarab tuzatishlar kiritiladi.
O'lganlarni hisoblash butun dunyo bo'ylab VFR (vizual parvoz qoidalari - yoki asosiy darajadagi) uchuvchilar uchun o'quv dasturida mavjud.[10] Samolyotda GPS kabi navigatsiya yordami bor yoki yo'qligidan qat'iy nazar o'qitiladi, ADF va VOR va bu ICAO Talab. Ko'plab uchish bo'yicha o'qitish maktablari o'quvchiga o'lik hisob-kitoblarni o'zlashtirmaguncha elektron vositalardan foydalanishga to'sqinlik qiladi.
Inertial navigatsiya tizimlari Zamonaviy samolyotlarda deyarli universal bo'lgan (INSes) ichki o'lik hisob-kitoblardan foydalanadi. INS deyarli har qanday sharoitda ishonchli navigatsiya qobiliyatini ta'minlaydi, tashqi navigatsiya ma'lumotnomalariga ehtiyoj qolmasdan, hanuzgacha u engil xatolarga moyil.
O'liklarni hisoblash bugungi kunda ba'zi bir yuqori darajalarda amalga oshirilmoqda avtomobil navigatsiya tizimlari cheklovlarini bartaraf etish uchun GPS /GNSS yolg'iz texnologiya. Sun'iy yo'ldosh mikroto'lqinli signallari mavjud emas mashinalar uchun garajlar va tunnellar, va ko'pincha qattiq tanazzulga uchragan shahar kanyonlari va sun'iy yo'ldoshlarni ko'rish yo'llarini to'sib qo'yishi sababli daraxtlar yaqinida yoki ko'p yo'lli tarqalish. O'lik bilan hisoblangan navigatsiya tizimida avtomobil g'ildirak atrofini biladigan va g'ildirakning aylanishini va boshqaruv yo'nalishini qayd etadigan datchiklar bilan jihozlangan. Ushbu sensorlar ko'pincha boshqa maqsadlarda mashinalarda mavjud (qulflashga qarshi tormoz tizimi, elektron barqarorlikni boshqarish ) ni navigatsiya tizimi tomonidan o'qilishi mumkin boshqaruv tarmog'i avtobus. Keyin navigatsiya tizimi a dan foydalanadi Kalman filtri har doim mavjud bo'lgan sensor ma'lumotlarini sun'iy yo'ldosh ma'lumotlaridan aniq, ammo vaqti-vaqti bilan mavjud bo'lmagan joylashuv ma'lumotlari bilan birlashtirilgan pozitsiyani tuzatish bilan birlashtirish.
O'liklarni hisoblash ba'zi robot dasturlarida qo'llaniladi.[11] Odatda, sezgirlik texnologiyasiga bo'lgan ehtiyojni kamaytirish uchun ishlatiladi ultratovushli sensorlar, GPS yoki ba'zilarini joylashtirish chiziqli va aylanuvchi kodlovchilar, an avtonom robot Shunday qilib, ishlash va takroriylik hisobiga xarajatlar va murakkabliklar sezilarli darajada kamayadi. Ushbu ma'noda o'lik hisob-kitobdan to'g'ri foydalanish ma'lum miqdordagi elektr energiyasini etkazib berish yoki gidravlik robotning harakatlantiruvchi dvigatellariga ma'lum vaqt davomida umumiy boshlang'ich nuqtadan bosim. O'liklarni hisoblash umuman to'g'ri emas, bu masofani baholashda bir necha millimetrgacha xatolarga olib kelishi mumkin (ichida CNC ishlov berish ) kilometrgacha (yilda.) PHA ), yugurish davomiyligi, robotning tezligi, yugurish uzunligi va boshqa bir qancha omillarga asoslanadi.[iqtibos kerak ]
Piyodalarning o'liklarini hisoblash (PDR)
Sensorning ko'payishi bilan smartfonlar, o'rnatilgan akselerometrlardan a sifatida foydalanish mumkin pedometr va o'rnatilgan magnetometr kompas sarlavhasi provayderi sifatida. Piyodalarning o'liklarini hisoblash (PDR) boshqa navigatsiya usullarini avtomobil navigatsiyasiga o'xshash tarzda to'ldirish yoki boshqa navigatsiya tizimlari mavjud bo'lmagan hududlarga navigatsiyani kengaytirish uchun ishlatilishi mumkin.[12]
Oddiy amalga oshirishda foydalanuvchi o'z telefonini oldida ushlab turadi va har bir qadam pozitsiyani kompas bilan o'lchangan yo'nalishda belgilangan masofani oldinga siljitishga olib keladi. Aniqlik sensorning aniqligi, inshootlar ichidagi magnit buzilishlar va tashish pozitsiyasi va qadam uzunligi kabi noma'lum o'zgaruvchilar bilan cheklangan. Yana bir qiyinchilik - bu yurishni yugurishdan farqlash va velosiped, zinapoyaga chiqish yoki liftda yurish kabi harakatlarni bilish.
Telefonga asoslangan tizimlar mavjud bo'lishidan oldin, ko'plab maxsus PDR tizimlari mavjud edi. A pedometr faqat bosib o'tgan chiziqli masofani o'lchash uchun ishlatilishi mumkin, PDR tizimlarida yo'nalishni o'lchash uchun ko'milgan magnetometr mavjud. Maxsus PDR tizimlari magnetometr sarlavhasidan yaxshiroq foydalanish uchun yuk ko'tarish holatining minimallashtirilgan maxsus botinkalari, kamarlari va soatlari kabi turli shakllarda bo'lishi mumkin. Haqiqiy o'liklarni hisoblash juda murakkab, chunki bu nafaqat asosiy driftni minimallashtirish, balki turli xil tashish stsenariylari va harakatlarini, shuningdek, telefon modellari orasidagi apparat farqlarini boshqarish ham muhimdir.[iqtibos kerak ]
Yo'naltirilgan o'liklarni hisoblash
Janubga yo'naltirilgan arava ikki g'ildirakdan iborat qadimgi xitoylik qurilma edi otli transport vositasi aravaning qanday burilishidan qat'i nazar, har doim janub tomon yo'naltirish uchun mo'ljallangan ko'rsatgichni olib yurgan. Aravada navigatsiyadan oldingi foydalanish tarixi ko'rsatilgan magnit kompas va qila olmadi aniqlash janub bo'lgan yo'nalish. Buning o'rniga u bir xil ishlatilgan yo'naltirilgan o'liklarni hisoblash: sayohat boshlanishida ko'rsatgich mahalliy bilimlar yoki astronomik kuzatuvlardan foydalangan holda qo'l bilan janubga yo'naltirilgan. ning Pole Star. Keyin, u sayohat qilayotganda, ehtimol mexanizmni o'z ichiga oladi differentsial tishli uzatmalar ikki g'ildirakning har xil aylanish tezligidan foydalanib, ko'rsatgichni o'z yo'nalishi bo'yicha, janubga qarab ushlab turilgan burilish burchagi bilan (mavjud mexanik aniqlik sharti bilan) arava tanasiga nisbatan ko'rsatgichni burishdi. Xatolar, har doimgidek o'lik hisob bilan, masofani bosib o'tgan sayin to'planib borar edi.
Tarmoqli o'yinlar uchun
Tarmoqli o'yinlar va simulyatsiya vositalari doimiy ravishda o'lik hisob-kitoblardan foydalanib, aktyorning hozirda qaerda bo'lishi kerakligini taxmin qiladi, oxirgi ma'lum bo'lgan kinematik holatidan (pozitsiyasi, tezligi, tezlashuvi, yo'nalishi va burchak tezligi) foydalanadi.[13] Bu, birinchi navbatda, kerak, chunki tarmoq o'yinlarini ko'pgina o'yinlar, ya'ni 60 Hz tezlikda yuborish maqsadga muvofiq emas. Asosiy echim chiziqli fizika yordamida kelajakka proektsiyalashdan boshlanadi:[14]

Ushbu formuladan tarmoq orqali yangi yangilanish olinmaguncha ob'ektni ko'chirish uchun foydalaniladi. O'sha paytda muammo shundaki, hozirda ikkita kinematik holat mavjud: hozirda taxmin qilingan holat va hozirgina qabul qilingan, haqiqiy holat. Ushbu ikki holatni ishonchli tarzda hal qilish juda murakkab bo'lishi mumkin. Bitta yondashuv egri chiziqni yaratishdir (masalan, kubik) Bézier splines, markazlashtirilgan Catmull-Rom splines va Hermit egri chiziqlari )[15] hali kelajakni loyihalashtirish paytida ikki davlat o'rtasida. Yana bir usul - proektsion tezlikni aralashtirish, bu ikki proektsiyaning (oxirgi ma'lum va oqim) aralashmasi bo'lib, bu erda joriy proyeksiya belgilangan vaqt ichida so'nggi ma'lum va joriy tezlik o'rtasidagi aralashmani ishlatadi.[13]




Kompyuter fanlari
Kompyuter fanida o'liklarni hisobga olish navigatsiya qilishni anglatadi massiv ma'lumotlar tarkibi indekslardan foydalanish. Har bir massiv elementi bir xil o'lchamga ega bo'lgani uchun mumkin to'g'ridan-to'g'ri kirish massivning istalgan pozitsiyasini bilish orqali bitta massiv elementi.[16]
Quyidagi qator berilgan:
| A | B | C | D. | E |
massiv boshlanadigan xotira manzilini bilib, D xotira manzilini hisoblash oson:

Xuddi shu tarzda, D xotira manzilini bilib, B xotira manzilini hisoblash oson:

Ushbu xususiyat ayniqsa muhimdir ishlash ning massivlari bilan birgalikda ishlatilganda tuzilmalar chunki ma'lumotlarga a orqali o'tmasdan to'g'ridan-to'g'ri kirish mumkin ko'rsatkichni ajratish.
Shuningdek qarang
- Xatolik
- Havo navigatsiyasi
- Arniston (Sharqiy Indiaman), kema halokati 1815
- Muvofiqlik va sarlavha ma'lumot tizimlari
- Samoviy navigatsiya
- Mijozlar tomonidan bashorat qilish
- Drift metr
- Ekstrapolyatsiya
- Honda Point halokati
- Inertial navigatsiya tizimi
- Yopiq joylashishni aniqlash tizimi
- Robot xaritalash
- Bir vaqtning o'zida lokalizatsiya va xaritalash
- Sferik trigonometriya
- Jeyms Kairdning sayohati
Adabiyotlar
- ^ Adams, Sesil. "O'lik hisob-kitob" "chiqarilgan hisob-kitob" uchun qisqartiriladimi? ". straightdope.com. Olingan 2018-02-02.
- ^ Xu, Lingxuan; Evans, Devid (2004-01-01). Mobil sensorli tarmoqlar uchun lokalizatsiya. Mobil hisoblash va tarmoq bo'yicha 10-yillik xalqaro konferentsiya materiallari. MobiCom '04. Nyu-York, Nyu-York, AQSh: ACM. 45-57 betlar. CiteSeerX 10.1.1.645.3886. doi:10.1145/1023720.1023726. ISBN 978-1-58113-868-9. S2CID 705968.
- ^ Mirebrahim, Hamid; Dehgan, Mehdi (2009-09-22). Ruis, Pedro M.; Garsiya-Luna-Aceves, Xose Xoakin (tahrir). Monte-Karlo qo'shni tugunlarning joylashuvi haqidagi ma'lumotlardan foydalangan holda mobil sensorli tarmoqlarni lokalizatsiya qilish. Kompyuter fanidan ma'ruza matnlari. Springer Berlin Heidelberg. 270-283 betlar. doi:10.1007/978-3-642-04383-3_20. ISBN 978-3-642-04382-6.
- ^ Haroon Rashid, Ashok Kumar Turuk, 'Mobil simsiz sensorli tarmoqlar uchun o'liklarni hisoblash lokalizatsiyasi texnikasi', IET Wireless Sensor Systems, 2015, 5, (2), p. 87-96, DOI: 10.1049 / iet-wss.2014.0043IET raqamli kutubxonasi, http://digital-library.theiet.org/content/journals/10.1049/iet-wss.2014.0043
- ^ Turuk, Harun (2015). "IET Digital Library: mobil simsiz sensorli tarmoqlar uchun o'liklarni hisoblash lokalizatsiyasi texnikasi". IET simsiz sensor tizimlari. 5 (2): 87–96. arXiv:1504.06797. doi:10.1049 / iet-wss.2014.0043. S2CID 14909590.
- ^ Gallistel. Ta'limni tashkil etish. 1990 yil.
- ^ O'liklarni hisoblash (yo'llarni birlashtirish) gipokampal shakllanishni talab qiladi: o'z-o'zidan qidirish va yorug'lik (allotetik) va qorong'u (idiotetik) testlarda fazoviy o'rganish vazifalari, IQ Whishaw, DJ Hines, DG Wallace, Behavioral Brain Research 127 (2001) 49 - 69
- ^ "Arxivlangan nusxa" (PDF). Arxivlandi asl nusxasi (PDF) 2006-03-13 kunlari. Olingan 2010-02-17.CS1 maint: nom sifatida arxivlangan nusxa (havola)
- ^ "Transport Canada TP13014E Sample Private Pilot Examination". Transport Kanada. Olingan 8 oktyabr 2013.
- ^ "ICAO 1-ilova 2.3.4.2.1-band." (PDF). ICAO. Arxivlandi asl nusxasi (PDF) 2017 yil 14-yanvarda. Olingan 18 oktyabr 2016.
- ^ Xaui M. Choset; Set Xatchinson; Kevin M. Linch; Jorj Kantor; Wolfram Burgard; Lidiya E. Kavraki; Sebastyan Thrun (2005). Robot harakatining tamoyillari: nazariya, algoritmlar va amalga oshirish. MIT Press. 285– betlar. ISBN 978-0-262-03327-5.
- ^ Piyodalarning o'liklarini hisoblash (PDR) soddalashtirilgan. GT Silicon. Olingan 22 yanvar 2018.
- ^ a b Merfi, Kertiss. Tarmoqli o'yinlar uchun ishonchli o'liklarni hisoblash. Game Engine Gems 2, Lengyel, Erikda nashr etilgan. AK Peters, 2011, p 308-326.
- ^ Van Vert, Jeyms. O'yinlar va interaktiv dasturlar uchun muhim matematik. Ikkinchi nashr. Morgan Kaufmann, 1971, p. 580.
- ^ Lengyel, Erik. 3D o'yin dasturlash va kompyuter grafikasi uchun matematika. Ikkinchi nashr. Charlz River Media, 2004 yil.
- ^ Gil Tene va Martin Tompson. "org.ObjectLayout, tartib uchun optimallashtirilgan Java ma'lumotlar tuzilishi to'plami". objectlayout.org. Olingan 19 oktyabr 2015.